
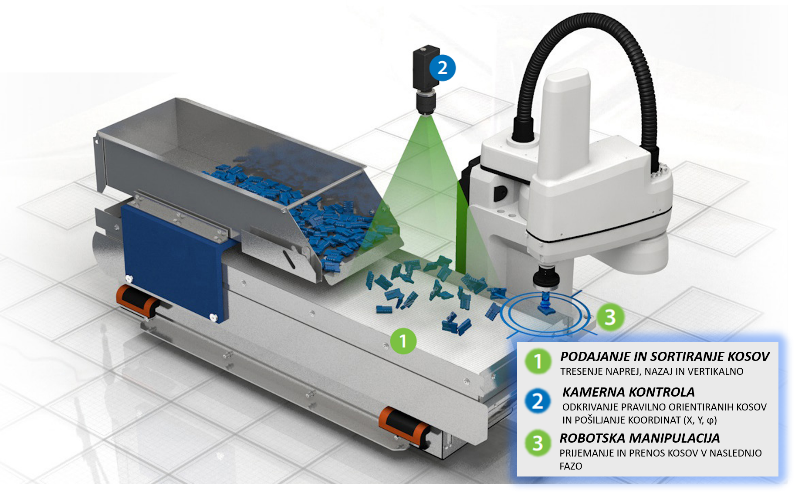
Predstavljamo univerzalno rešitev doziranja, segmentiranja in sortiranja izdelkov na proizvodni liniji. Rešitev povezuje vibracijski podajalnik, zmogljiv sistem strojnega vida, večosni oz. SCARA robot ter hitro komunikacijsko povezavo med posameznimi segmenti in eksternimi napravami. Gre za sistem, ki je nepogrešljiv v skoraj vsakem proizvodnem procesu, kjer se soočamo z izzivi optimalnega sortiranja, vstavljanja, prelaganja proizvodov ali njihovih sestavnih delov.
V sodobnih industrijskih procesih stremimo k naprednejši tehnologiji, ki bi zmanjšala proizvodne stroške in pohitrila proizvodni proces. V obratih, kjer izdelujejo manjše izdelke ali pol izdelke nastajajo težave pri sortiranju velikih količin razsutega materiala. Ena izmed rešitev je bila z vibracijskimi podajalniki, ki so masivni, hrupni in velikih dimenzij, za menjavo materialov pa je bilo potrebno veliko časa.
Omron Anyfeeder rešitev predstavlja celotni paket učinkovitega in prilagodljivega sortiranja majhnih kosov. Njegova fleksibilnost pri podajanju majhnih delov različnih velikosti, oblik in materialov omogoča hitro menjavo linije, s tem pa znatno niža stroške proizvodnje.
Predstavljamo posamezne segmente Omron Anyfeeder rešitve, delovanje strojnega vida in opis algoritmov, kot tudi princip delovanja sortirne naprave in načini tresenja, ki zagotavljajo zanesljivo delovanje.
Sklopi OMRON Anyfeeder rešitve
Podajalni stresalniki serije Anyfeeder SX/SXM so namenjeni za uporabo v kombinaciji z industrijskim robotom in sistemom strojnega vida za namen hitrega in zanesljivega sortiranja razsutih kosov. V primerjavi s klasičnimi vibracijskimi podajalniki je Anyfeeder kompaktno zasnovan, z namenom enostavne integracije na proizvodno linijo in večjo fleksibilnostjo pri menjavi kosov.
Omron Anyfeeder se uporablja povsod, kjer je potreba po upravljanju večje količine majhnih kosov, saj s svojim edinstvenim načinom delovanja omogoča natančno, hitro in prilagodljivo razvrščanje na proizvodnih linijah, še posebej v obratih kjer se sistemi stalno spreminjajo.
Primerni so za:
- avtomobilsko industrijo,
- elektrotehniko,
- polprevodniško industrijo,
- finomehanične izdelke,
- pakirne aplikacije,
- kozmetiko,
- strojih za sestavljanje izdelkov,
- zobozdravstveno in medicinsko tehnologijo.
Omron Anyfeeder rešitev
Anyfeeder
Anyfeeder je vibracijski podajalnik in stresalnik, ki omogoča fleksibilno podajanje in sortiranje kosov poljubnih oblik, katere s pomočjo različnih kombinacij tresenja, hitro in učinkovito segmentira.
Na voljo je več modelov, ki se med sabo ločijo v velikosti zalogovnika in stresalne površine. Večji modeli SX240 in SX340 imajo dodatno vgrajene pnevmatske priključke, ki omogočajo funkcionalnost zadrževalnika (slika 2) za precizno podajanje kosov iz zalogovnika na sortirno površino.

Sestavni deli Anyfeeder naprave
Podajalnik komunicira preko enostavnih ukazov na povezavi RS232. Protokol krmilja je standardiziran in dobro opisan, kar omogoča integracijo tudi v robotske sisteme drugih proizvajalcev.
Na učinkovitost razvrščanja kosov vpliva predvsem njihova velikost, oblika in masa, ki posledično zahtevajo namenske nastavitve parametrov tresenja. Na stresalniku lahko nastavljamo jakost in čas tresenja posameznih ukazov kot so:
- Smer tresenja naprej, nazaj, vertikalno,
- obračanje naprej in nazaj,
- podajanje kosov iz zalogovnika in
- čiščenje zalogovnika ter sortirne površine.
Na sortirno površino želimo dodajati ustrezno količino kosov, da jih lahko hitro razvrščamo z dovolj velikim medsebojnim razmakom, saj le to omogoča robotskemu prijemalu zanesljivo prijemanje. Omron Anyfeeder lahko krmilimo s PLK-jem preko komunikacije RS232. V programsko kodo je potrebno implementirati niz ukazov, s katerimi kreiramo zaporedje tresenja in obračanja, ki zagotovi optimalno razvrščanje kosov.
Prav tako lahko Anyfeeder integriramo v Omron razvojno okolje ACE, v katerem najdemo tudi ostale Omron industrijske robote in kamere. Programska oprema bazira na IPC aplikaciji v kateri lahko programiramo robote, z dodatkom ACE vision paketa pa lahko upravljamo z algoritmi strojnega vida. IPC ima na voljo PoE porte, na katere povežemo Omron GigE kamero in nato kreiramo algoritem prepoznavanja pravilne orientacije kosov. S tem lahko IPC aplikacija v kombinaciji z ACE razvojnim okoljem pokriva celotno področje programiranja vseh segmentov Omron Anyfeeder rešitve.
Strojni vid
Sistem strojnega vida se določi glede na fizične lastnosti kosa, ki ga želimo odkrivati s kamero. Potrebno je upoštevati njihovo velikost, barvo in obliko, kot tudi osvetlitev okolice. Ti dejavniki so bistvenega pomena pri izboru ločljivosti in tipa senzorja (barvni ali monokromatski) ter izboru osvetlitve. V tej aplikaciji je standardna konfiguracija strojnega vida samostojna pametna kamera nameščena pravokotno nad sortirno površino, integrirana osvetlitev ozadja pod sortirni površini in C-mount objektiv, ki se določi glede na oddaljenost med kamero in sortirno površino. V prvi fazi je potrebno nastaviti odprtost zaslonke in fokus glede na jakost osvetlitve ozadja (integrirano pod stresalno površino Anyfeederja).

Omron kamere
Primer aplikacije predstavlja Omron pametna kamera serije FHV7, ki deluje kot samostojna naprava povezana na PLK preko izbrane komunikacije Ethernet/IP ali ProfiNET. Programsko okolje kjer se kreira ustrezen algoritem strojnega vida je t.i. Remote operation tool FZ-PanDA v katerem je na voljo širok nabor naprednih algoritmov, ki omogočajo: merjenje, iskanje oblik in robov, defektov, obdelavo slik, kalibracije, OCR, logične operacije, preračunavanje, kompenzacije, shranjevanje slik, povezava podatkov na fieldbus in še mnogo več.
V prvem delu algoritma je na vidnem polju potrebno izmeriti širino sortirne površine. Ta je osvetljena od zadaj in ustvari izrazito razliko kontrastov, ki jasno prikaže zunanje robove.
Izmerjeno širino uvozimo v kalibracijski algoritem, določimo dejansko širino v milimetrih in generiramo kalibracijske parametre, ki pretvorijo izmerjene vrednosti v realne. V algoritmu je še potrebno določiti skupno točko koordinatnega izhodišča kamere in robota ter orientacijo koordinatnega sistema (desnosučni ali levosučni).
V naslednji fazi uporabimo napredni algoritem t. i. Shape search Ⅲ v katerem označimo objekt iz slike, ki ga želimo odkrivati. V nadaljevanju funkcija registrira model na podlagi pridobljenih podatkov kontur in primerja kateri model je najbolj podoben izvirnemu. Korelacijski faktor nakazuje stopnjo podobnosti in ga nastavimo na vrednost, ki zagotovi, da algoritem ne odkriva kose, ki se prekrivajo.
Za vsak ustrezen model, ki dosega zahteve jih algoritem odkrije in poda informacije kot so:
- ocena uspešnosti kontrole (OK/NG),
- število odkritih kosov,
- korelacijski faktor in
- koordinate kosa (X, Y, ϕ).
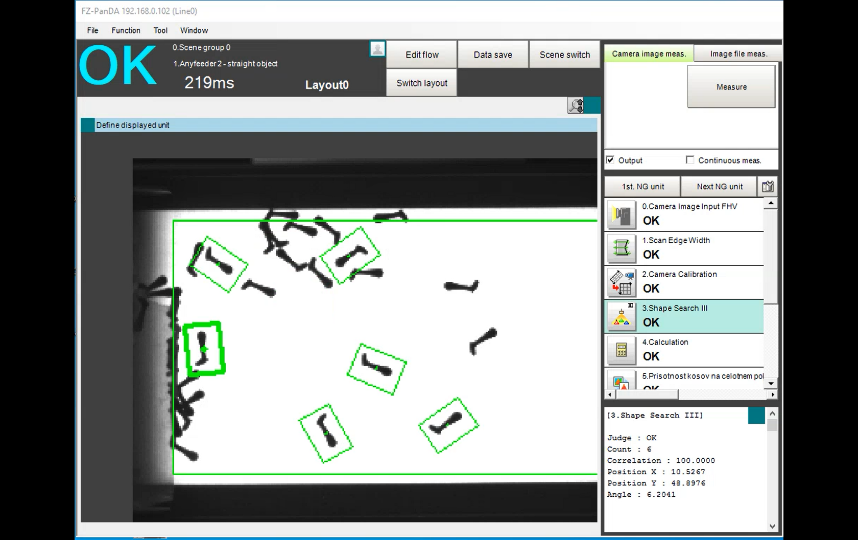
Algoritem strojnega vida z Omron FHV7 pametno kamero
V nadaljevanju uporabimo algoritem t. i. Gravity Area, s katerim štejemo količino temnih pikslov na začetku in koncu sortirne površine. Dobljene vrednosti predstavljajo dejansko količino kosov, ki se nahajajo na površini in le te pošiljamo na PLK preko Fieldbus komunikacije. V programski kodi uporabimo podatke za način tresenja naprej in nazaj, s tem pa zagotovimo, da se kosi ne kopičijo samo na eni strani ampak se enakomerno razporedijo po celotni površini.
V praksi se pojavljajo aplikacije, kjer gladka sortirna površine ne ustreza za pravilno postavitev oz. orientacijo kosov. Primer takšne aplikacije je sortiranje vijakov, kjer je zahteva orientacije vijaka z glavo navzgor. V teh primerih se uporabi prilagojena sortirna površina z utori, ki s pomočjo tresenja učinkovito vstavi vijake v utore.
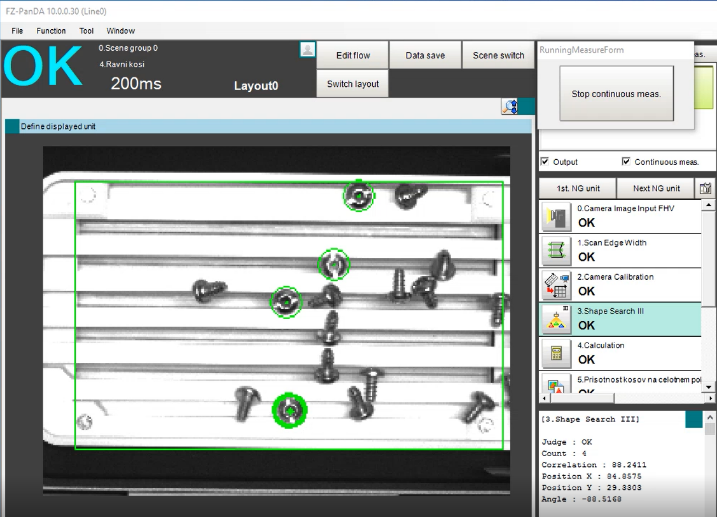
Sortiranje vijakov s prilagojeno površino
PLK – Omron NJ
Krmilnik vzpostavlja komunikacijo med vsemi napravami in celotno rešitev avtomatizira. Omron PLK serije NJ omogoča uporabo kartice za serijsko komunikacijo, ki podpira t. i. protocol macro. Le ta omogoča da implementiramo sintakse ukazov Anyfeederja v makro-je, s tem poenostavimo prenos ukazov na Anyfeeder.
Na začetku programskega cikla prožimo inšpekcijo na kameri, ki zažene algoritem strojnega vida. Slednji primerja naučen model z zajeto sliko in ko najde pravilno orientirane kose, pošlje povratne informacije na PLK. V kolikor so kosi prisotni na stresalni površini, pridobimo število temnih pikslov prisotnih na začetnem in končnem polju sortirne površine. Nato se v programski kodi vrednosti primerjajo s spodnjo in zgornjo nastavljeno limito, ki sekvenčno prožijo smer tresenja kosov naprej-nazaj. V primeru, da so vrednosti obeh polj pod spodnjo limito, se začne izvajati podajanje kosov iz zalogovnika vse do dosežene zgornje limite.
Pri pravilno orientiranih kosih, kamera pošlje njihove koordinate (X, Y, ϕ), PLK pa jih direktno posreduje robotu, ki opravi manipulacijo pobiranja kosa. Ko želimo v Anyfeeder-ju uporabiti nov tip kosov, se v programu izvede ukaz za praznjenje zalogovnika in sortirne površine. Temu ukazu je potrebno ustrezno nastaviti čas tresenja, da zagotovimo popolno praznjenje kosov skozi zadnjo loputo. Prav tako je potrebo pri menjavi na nov tip kosov upoštevati program tresenja, le ta je prilagojen gleda na njihove fizične lastnosti, zato je primerno uporabiti recepture, ki vsebujejo prilagojene parametre za vsak tip.
Robot
V Omron portfelju industrijskih robotov so v aplikaciji Anyfeeder rešitve primerni SCARA i4L, 6-osni Viper, in kolaborativni TM roboti. Za hitre manipulacije kot pri »pick and place« aplikacijah je primernejši SCARA i4L robot, ki dosega ciklične čase do 0,48s, ključna prednost tega robota pa je integriran robotski krmilnik (serije NJ). V kolikor je potreba po manipulaciji robota z več gibi in koraki (primer aplikacije sestavljanja ali pakiranja) je primernejši 6-osni robot Viper.
Prednost Omron robotskega IPC sistema je skupna platforma ACE (Automation Control Environment), v kateri lahko upravljamo celotni portfelj Omron industrijskih robotov, Anyfeeder-jev in sistemov strojnega vida v enem okolju. S tem komunikacija med napravam deluje bolj učinkovito in prenos podatkov se poenostavi.

Omron industrijski roboti